Simscape Multibody(前身为 SimMechanics)提供了适用于三维机械系统(例如机器人、汽车悬架系统、建筑设备和飞机起落架)的多体仿真环境。您可以使用表示物体、关节、约束、力元件和传感器的模块对多体系统进行建模。Simscape Multibody 会建立整个机械系统的运动方程并解出该方程。您可将完整的 CAD 装配件(包括所有质点、惯量、关节、约束和三维几何结构)导入到模型中。您可以通过自动生成的三维动画直观地了解系统动态特性。
Simscape Multibody 可帮助您开发控制系统并测试系统级性能。您可以利用 MATLAB 变量和表达式参数化您的模型,并在 Simulink 环境下为多体系统设计控制系统。您可以利用 Simscape 产品系列中的组件将液压、电气、气动和其他物理系统集成到您的模型中。Simscape Multibody 还支持生成 C 代码,以便您将模型部署到其他仿真环境,包括硬件在环 (HIL) 系统。
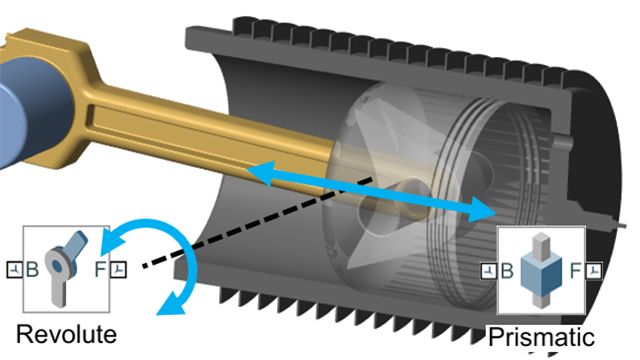
三维机制仿真
创建任何三维机制的多体模型。使用参数化的三维几何结构或 CAD 数据定义部件。使用关节连接部件以定义自由度。

CAD 导入
自动转换 CAD 设计以创建系统的数字孪生。直接引用 CATIA®、Creo™、Inventor®、NX™、Solid Edge®、SolidWorks® 和 Parasolid® 文件
模型部署
将您的 Simscape 模型转换为 C 代码以测试控制算法。在执行物理测试之前,在 dSPACE®、Speedgoat、OPAL-RT 和其他实时系统上运行 HIL 测试。
MATLAB 和 Simulink
使用 MATLAB 自动执行模型装配、测试和后处理等任务。使用 Simulink 在同一环境中集成控制算法和硬件设计。

产品资源:
Simscape 产品系列
Simscape 产品系列提供了用于物理系统仿真的模型和求解器技术。通过将组件组装成原理图,对电气、机械、流体和其他物理系统进行建模。
Simscape
建模和仿真多域物理系统
Simscape Electrical
电子、机电和电力系统建模和仿真
Simscape Battery
设计和仿真电池与储能系统
Simscape Fluids
流体系统建模和仿真
Simscape Driveline
旋动和平动机械系统的建模和仿真
Simscape Multibody
对多体机械系统进行建模和仿真

“Simulink、Simscape Multibody 和 Simulink Coder 使我们能够以自主方式将 MRO 车辆的精确 CAD 模型转换为实时运行的 C 代码。”
Jim Chapel,Lockheed Martin Space Systems
下一步是什么?



您也可以从以下列表中选择网站:
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
亚太
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)